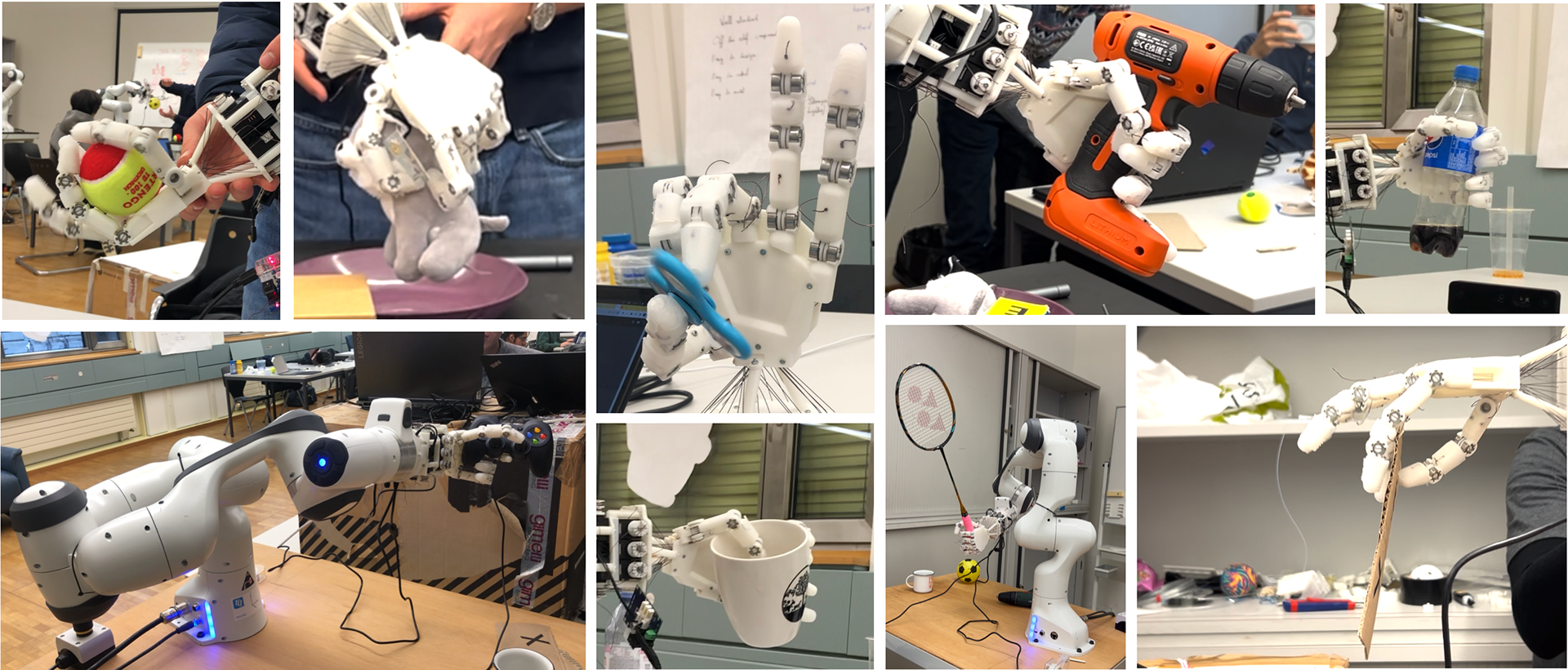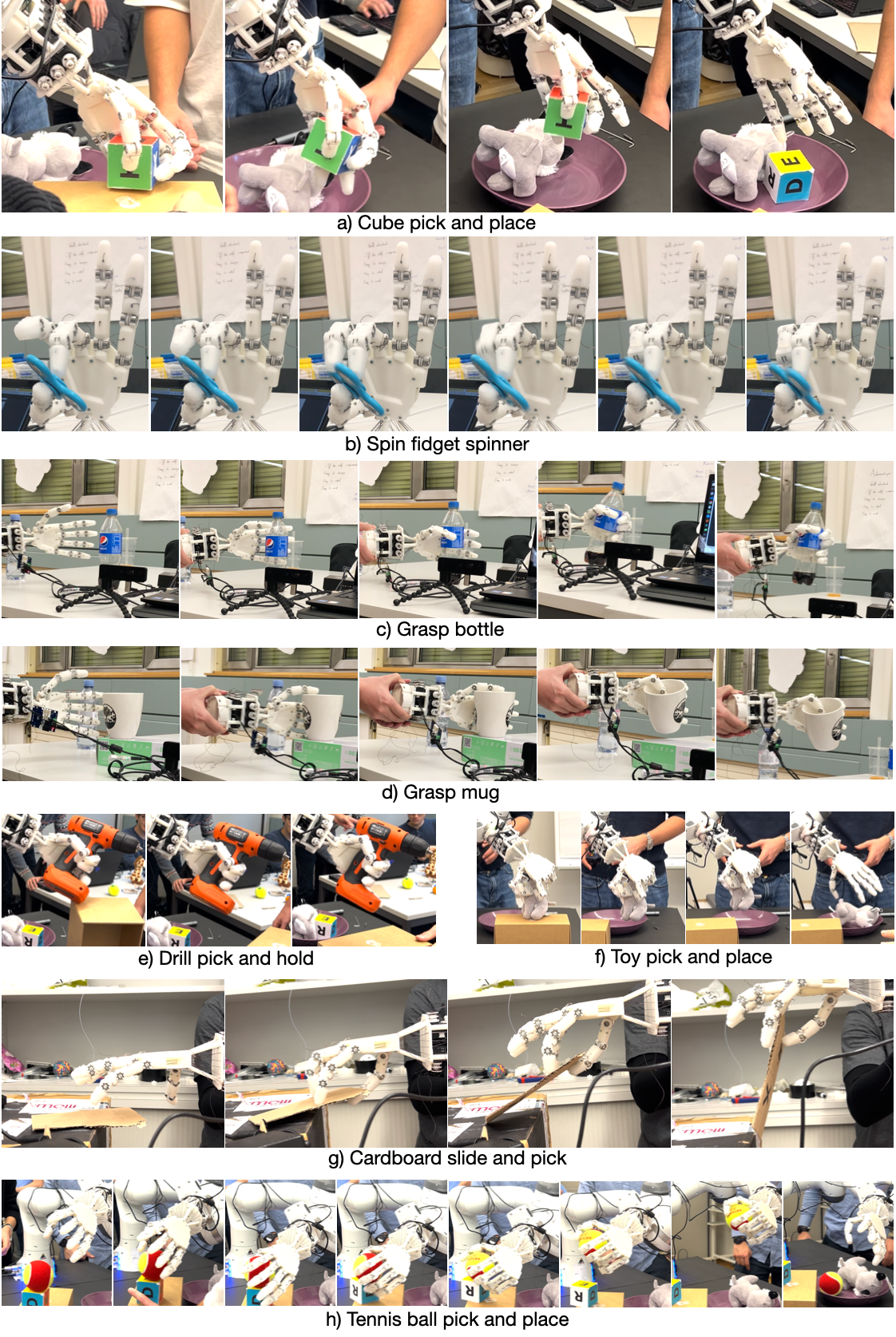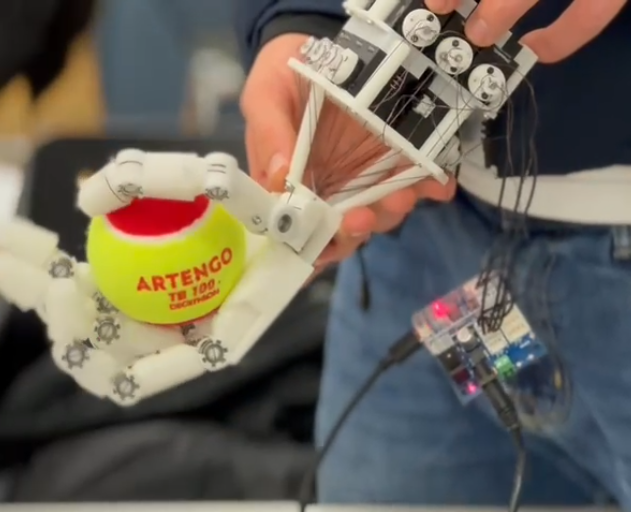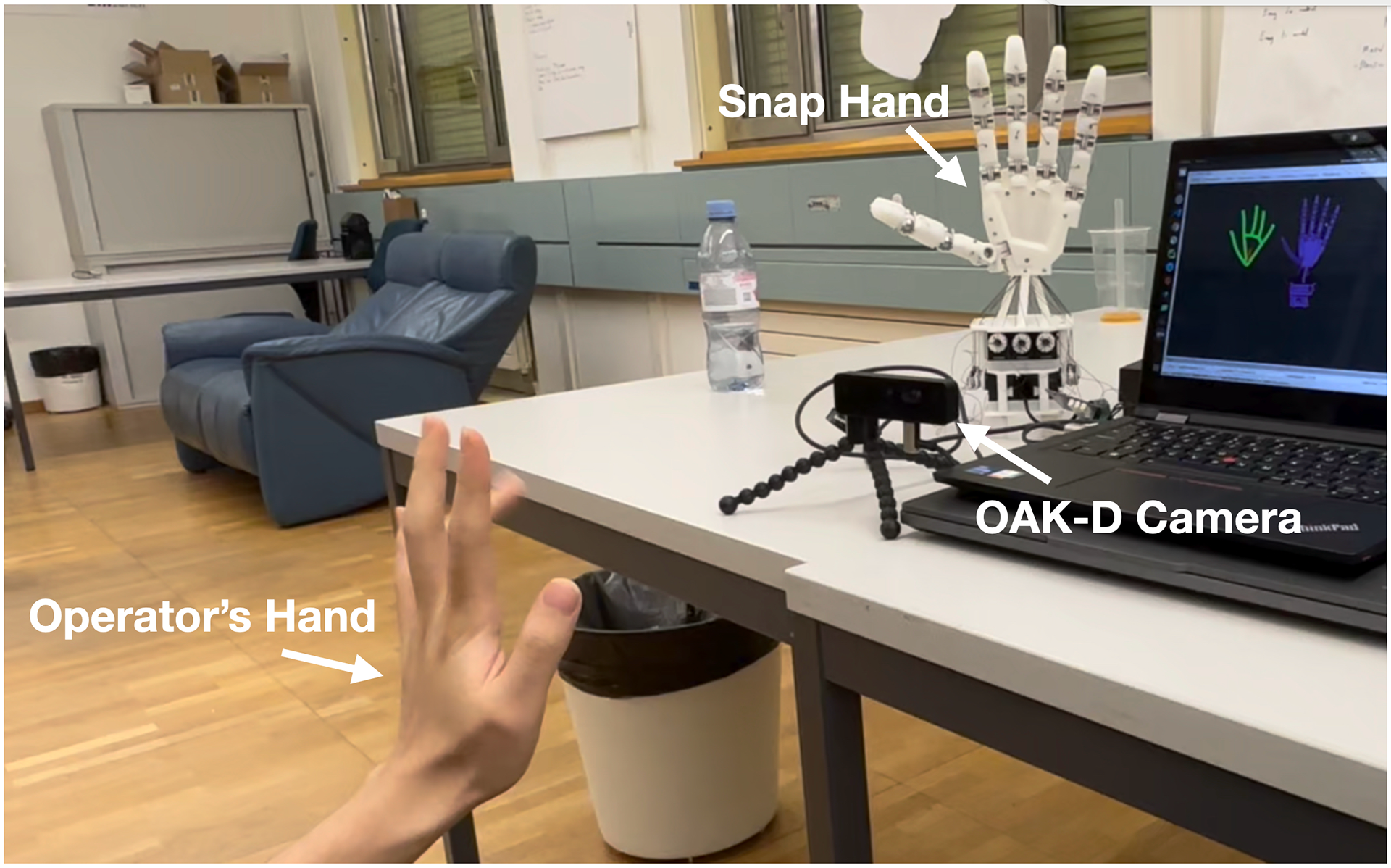

The Snap Hand is an 11 degree of freedom biomimetic robotic hand built as part of the ETHZ Soft Robotics Laboratory's Real World Robotics project. As a group of 5, we designed the hand from the ground up to feature an innovative way to rapidly assemble the phalanges of the hand while connecting tendons to control the hand from the wrist position, making it lighter and more anthropomorphic. I focused on designing the wrist and on the kinematics model of the hand to simulate it in NVIDIA's Isaac Gym. There, I created an environment for an agent to learn to roll a ball at a desired angular velocity, which it can achieve in various directions of rotation. The policy was then tuned to bridge the Sim2Real gap and deployed successfully on the hand. The hand also featured a teleoperation mode where the user can use a stereo camera and the Snap Hand will mimic the users motions, achieving various dexterous tasks.