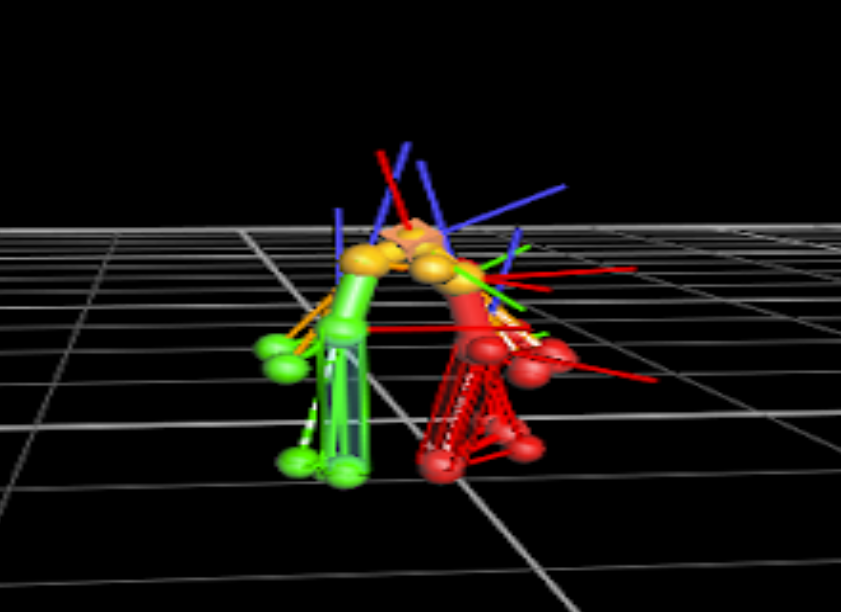

Over the summer, I participated in the Tandon Undergraduate Summer Research Program, where I studied the gait of a bipedal robot using a completely passive hip, and parametrized traits such as walking speed and stability with center of mass and walking frequency.
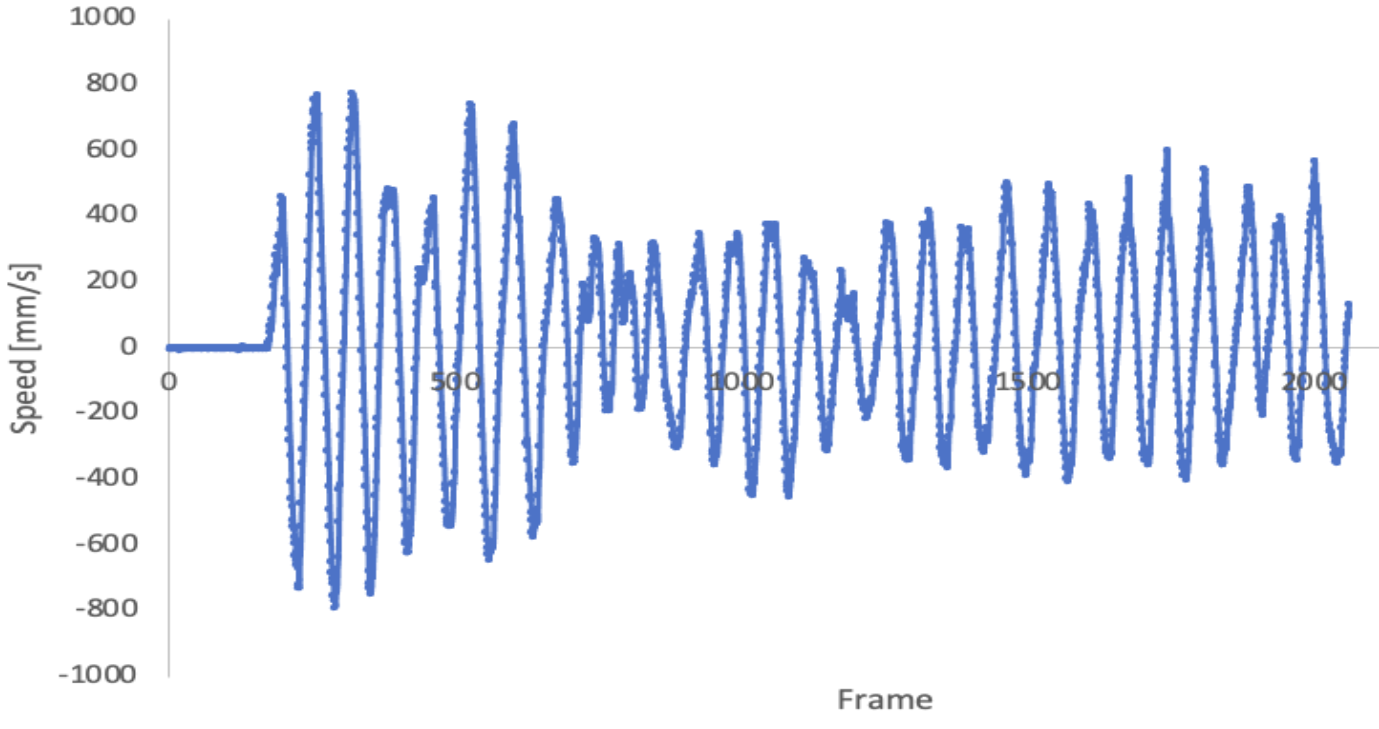
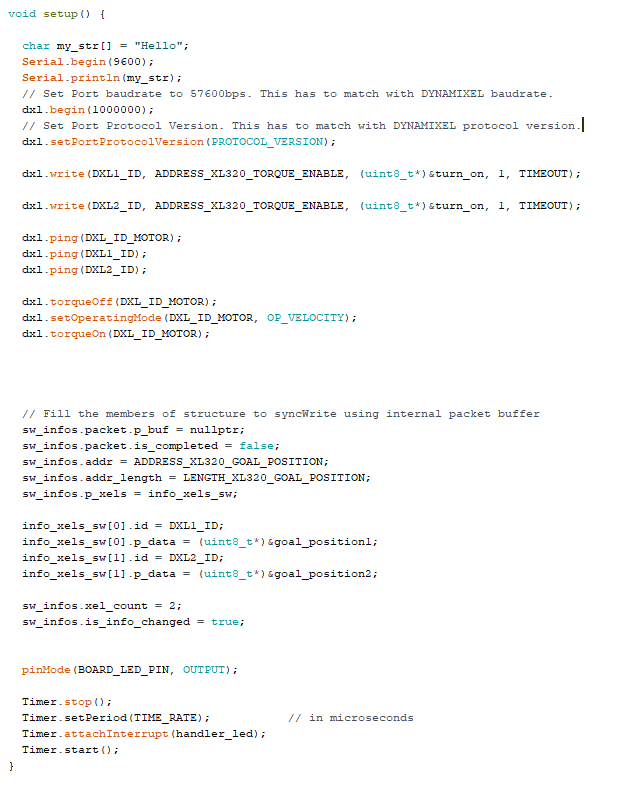
I utilized VICON motion capture cameras and a variety of microcontrollers to actuate and record the robot as it walked, and compared physical data with simulation software to iterate upon the robot's design. Furthermore, I developed a stability test platform to deliver an impulse disturbance on the robot at a specific point in it's gait, establishing stability boundaries.
The data was collected over the summer of 2022, and was analyzed to develop further iterations of the robot. Preliminary research into adding mass to increase walking speed was conducted.